中海达三维激光实景技术在智慧交通中的应用
三维激光实景技术在智慧交通中的应用
提供交通要素快速高效的采集、处理技术手段,提供全要素综合交通信息化智慧管理系统。实现三维实景可视化资产管理平台/资产普查平台,以及基于高精度测绘技术的道路改扩建、大修中修、竣工验收等工程测量应用。同时还可以为高精度道路三维建模、交通BIM-GIS应用、高精度自动导航(无人驾驶)等诸多交通应用提供强大的数据和技术支持。
方案框架
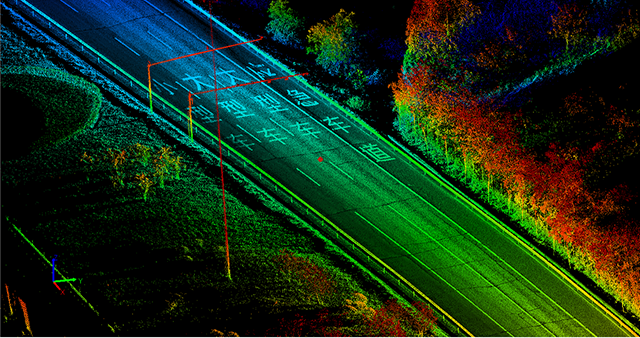
三维激光全景移动测量是近年兴起的一种快速、高效、非接触式的测绘技术,其在机动车上装配GPS(全球定位系统)、全景相机、三维激光扫描仪、定位定姿惯性导航系统等传感器和设备,在车辆高速行进之中,快速采集道路及两旁地物的高清影像及激光点云,并根据各种应用需要进行各种要素特别是道路两旁要素的任意任时的按需测量,包括道路中心线或边线位置坐标、目标地物的位置坐标、路(车道)宽、桥(隧道)高、交通标志、道路设施等。
道路信息普查与管理总体流程如下:

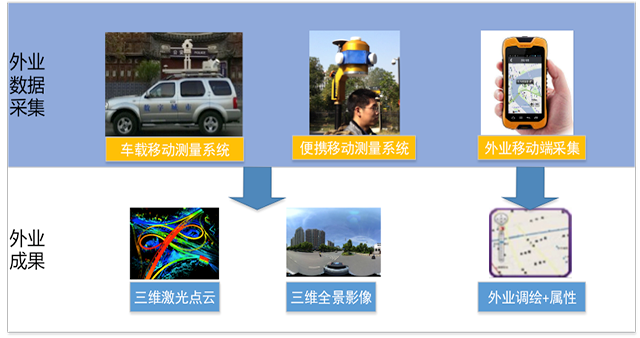
数据采集
外业数据采集是现实基础,在外业数据采集上,将严格按照项目要求的数据采集规范进行。外业数据信息采集一般需先按照项目的采集要求制定采集方案,方案中将明确采集的数据精度、数据内容、类型等信息,并规范整个采集的流程。
外业采集包括车载激光移动测量系统采集、背包激光系统采集和外业调绘补采,对于可通车街道两旁数据,主要利用车载激光移动测量系统进行外业数据采集;对于人行辅道、人行隧道、涵洞等车辆无法行驶到的道路区域,以及一些单点全景站点及特殊位置,则需要采用人工补采的方式进行相应数据采集。
总体而言,外业采集流程分为三个阶段,分别为前期准备阶段、数据采集阶段以及数据整理阶段。
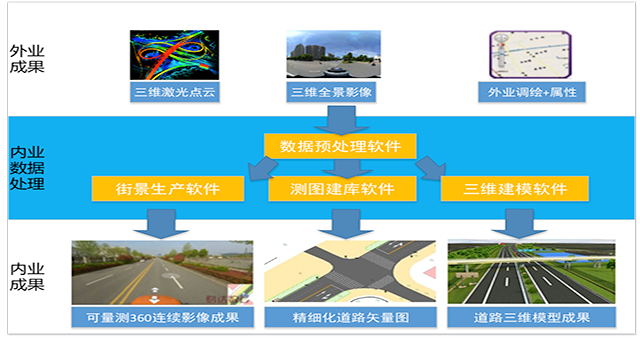
数据生产
内业处理主要包括原始数据预处理、道路标示标牌等数据提取、实景三维数据生产,以及属性数据调绘填充:
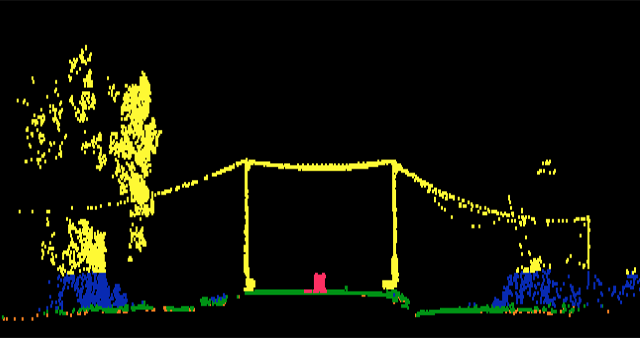
原始数据预处理主要通过数据预处理软件(HD Scene)将HiScan-S获取的原始数据进行融合解算处理、输出带坐标的点云以及和点云配准了的全景影像(影像点云);
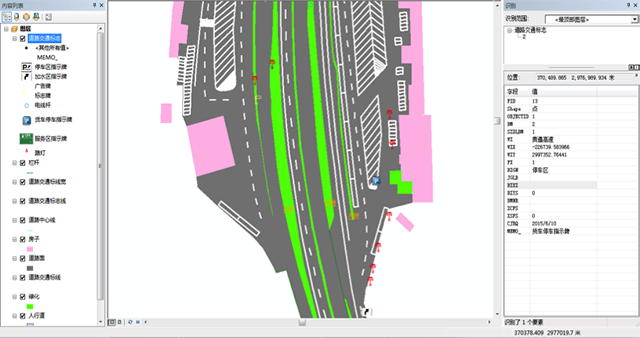
根据点云配准了的全景影像中间成果数据,通过点云数字测图软件(HD ptCloud Vector forArcgis)将道路边线、道路中间线、标示标牌等交通道路要素数据空间信息提取出来,输出得到二维矢量图数据;
实景三维数据生产主要通过三维实景数据生产软件(HD ptCloud StreetView)进行线路轨迹编辑、三维面片提取、隐私处理、全景切片等,并将处理后的成果数据存入三维实景影像库;
对于提取得到的二维矢量图数据,由于有的属性是可以从点云与影像数据中提取到的,例如标示牌高度等,但也存在很多特殊属性是外业调绘不到的,例如道路建设单位、建设时间等。因此需要进行相应的内业道路档案查询,在Arcgis中将相应的属性信息填充输入到属性字段中,形成完整的二维矢量图与属性库。另外需要对二维矢量图进行检查工作和局部修正。
功能应用
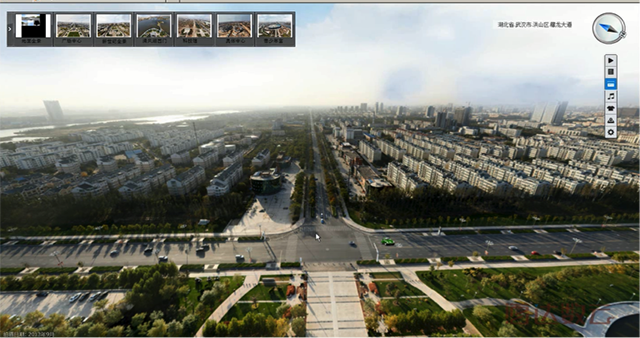
可视化综合应用服务平台

交通资产要素管理
道路竣工验收及改扩建
交通障碍物监测
三维可视化交通疏导管理
声明①:文章部分内容来源互联网,如有侵权请联系删除,邮箱 cehui8@qq.com
声明②:中测网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。
加群提示:我们创建了全国32个省份的地方测绘群,旨在打造本地测绘同行交流圈,有需要请联系管理员测小量(微信 cexiaoliang)进群,一人最多只能进入一个省份群,中介人员勿扰